Abstract
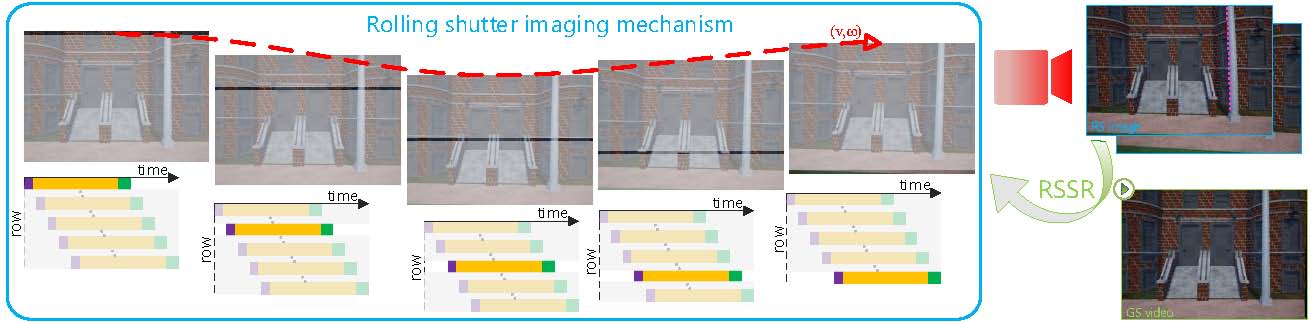
Rolling shutter (RS) images can be viewed as the result of the row-wise combination of global shutter (GS) images captured by a virtual moving GS camera over the period of camera readout time. The RS effect brings tremendous difficulties for the downstream applications.
In this paper, we propose to invert the above RS imaging mechanism, i.e., recovering a high framerate GS video from consecutive RS images to achieve RS temporal super-resolution (RSSR).
This extremely challenging problem, e.g., recovering 1440 GS images from two 720-height RS images, is far from being solved end-to-end.
To address this challenge, we exploit the geometric constraint in the RS camera model, thus achieving geometry-aware inversion.
Specifically, we make three contributions in resolving the above difficulties:
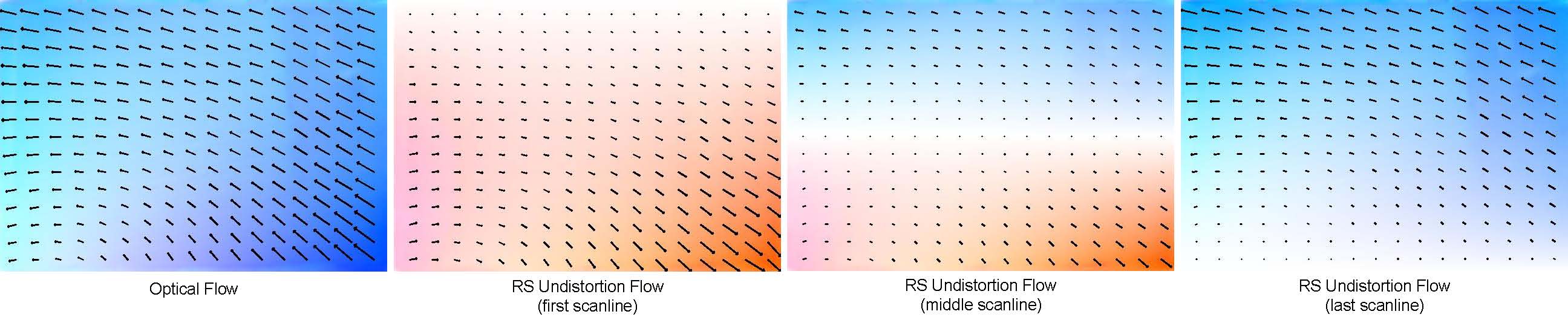
(i) formulating the bidirectional RS undistortion flows under the constant velocity motion model,
(ii) building the connection between the RS undistortion flow and optical flow via a scaling operation, and
(iii) developing a mutual conversion scheme between varying RS undistortion flows that correspond to different scanlines.
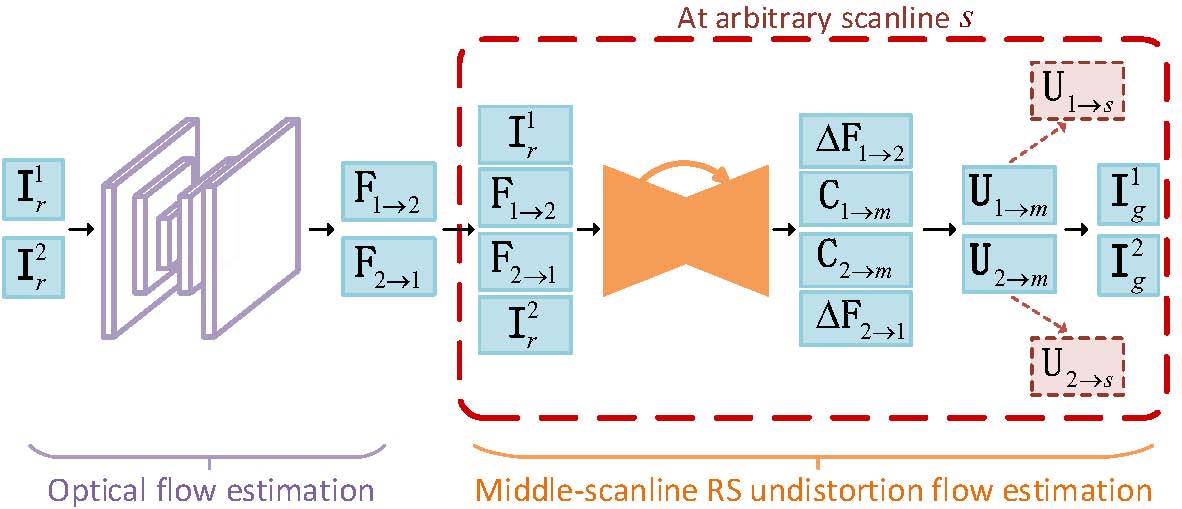
Building upon these formulations, we propose the first RS temporal super-resolution network in a cascaded structure to extract high framerate global shutter video.
Our method explores the underlying spatio-temporal geometric relationships within a deep learning framework, where no extra supervision besides the middle-scanline ground truth GS image is needed. Essentially, our method can be very efficient for explicit propagation to generate GS images under any scanline.
Experimental results on both synthetic and real data show that our method can produce high-quality GS image sequences with rich details, outperforming state-of-the-art methods.